電氣控制設(shè)計(jì)PLC污水處理系統(tǒng)
發(fā)布日期:2015-08-19 14:45 瀏覽次數(shù):
水污染是我國(guó)城市面臨的嚴(yán)重環(huán)境問(wèn)題���,它不僅危害人民的身體健康,還抑制了我國(guó)經(jīng)濟(jì)的發(fā)展���,破壞了生態(tài)平衡���,并容易導(dǎo)致水荒的發(fā)生����。城市污水處理設(shè)施的建設(shè)是現(xiàn)代化城市經(jīng)濟(jì)發(fā)展和水資源保護(hù)不可缺少的組成部分,工業(yè)污水由于成分復(fù)雜���,有害污染物多,處理難度大,一直是企業(yè)發(fā)展壯大的瓶頸�。為了實(shí)現(xiàn)污水處理的過(guò)程能在惡劣的環(huán)境中(溫差大����、污水水質(zhì)水量變化大、電網(wǎng)電壓波動(dòng)大、電氣干擾嚴(yán)重)能夠連續(xù)��、穩(wěn)定���、可靠、準(zhǔn)確地工作����,對(duì)控制系統(tǒng)的要求有著比一般的過(guò)程控制系統(tǒng)更高的要求����。
隨著計(jì)算機(jī)控制技術(shù)的發(fā)展����,可以對(duì)污水處理實(shí)現(xiàn)日常的信息化管理�。針對(duì)湖北宜都高壩洲污水廠污水處理系統(tǒng)���,南京康卓環(huán)境科技有限公司設(shè)計(jì)一套基于工業(yè)以太網(wǎng)和profibus總線的污水處理自控系統(tǒng)����,對(duì)污水處理過(guò)程進(jìn)行自動(dòng)控制和遠(yuǎn)程監(jiān)視���。系統(tǒng)采用模糊pid控制方法,結(jié)合了模糊控制方法的動(dòng)態(tài)性能和pid控制算法的穩(wěn)態(tài)性能,由上位機(jī)和現(xiàn)場(chǎng)設(shè)備構(gòu)成����。
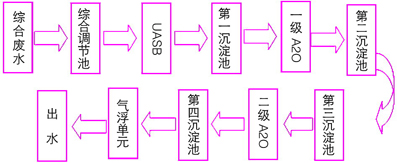
2 污水處理工藝流程
污水處理是一個(gè)復(fù)雜的大滯后的生化反應(yīng)過(guò)程��,如果通過(guò)機(jī)理的方法���,建立精確的數(shù)學(xué)模型是很復(fù)雜的�����,而采用一般的控制方法�����,大滯后問(wèn)題又很難被解決。此外��,還有加混凝劑和曝氣等裝置以及污泥的處置單元來(lái)收集各個(gè)沉淀池的污泥��。
3 污水處理控制系統(tǒng)總體方案
污水處理控制部分由中央控制室��、風(fēng)機(jī)房、污泥處理房構(gòu)成�����。中央控制室里面設(shè)置中央控制的plc和裝有wincc組態(tài)軟件的上位機(jī)以及電氣控制柜����。風(fēng)機(jī)房里面設(shè)置一個(gè)遠(yuǎn)程i/o控制站和風(fēng)機(jī)部分的電氣柜。污泥處理房設(shè)置一個(gè)遠(yuǎn)程i/o控制站和污泥機(jī)的電氣控制柜�。
如圖2所示���,系統(tǒng)采用以太網(wǎng)和現(xiàn)場(chǎng)總線混合型結(jié)構(gòu)����,現(xiàn)場(chǎng)層的通信采用profibus-dp主/從協(xié)議���,使用屏蔽雙絞線作為傳輸介質(zhì)�����,不同的子網(wǎng)和不同介質(zhì)之間可通過(guò)藕合器或接口模塊連接。過(guò)程監(jiān)控層使用以太網(wǎng)協(xié)議��,通過(guò)帶有雙網(wǎng)卡的plc進(jìn)行通信協(xié)議的轉(zhuǎn)換��,一塊網(wǎng)卡為profibus-dp網(wǎng)卡(自帶)��,另一塊為以太網(wǎng)卡(cp343-1)。因此���,plc作為現(xiàn)場(chǎng)總線中的一個(gè)站,又作為以太網(wǎng)上的一個(gè)站點(diǎn),而操作員站計(jì)算機(jī)和工程師站計(jì)算機(jī)不作為現(xiàn)場(chǎng)總線網(wǎng)絡(luò)中的站點(diǎn)。只作為以太網(wǎng)中的節(jié)點(diǎn)��,此網(wǎng)上的各站點(diǎn)相互之間的數(shù)據(jù)交換通過(guò)以太網(wǎng)進(jìn)行,而現(xiàn)場(chǎng)的信息也通過(guò)以太網(wǎng)從plc的寄存器中讀取�,控制現(xiàn)場(chǎng)的參數(shù)也由以太網(wǎng)送到dp主站plc的寄存器中��,再通過(guò)主/從協(xié)議傳送到現(xiàn)場(chǎng)總線中的各從站。
中央控制室由一臺(tái)操作站兼工程師站以及一臺(tái)打印機(jī)組成�����。過(guò)程plc控制系統(tǒng)主要選用西門(mén)子s7-300的產(chǎn)品���。plc的cpu選用cpu315-2dp����,它集成了profibus-dp總線的端口,利用這個(gè)口實(shí)現(xiàn)和遠(yuǎn)程的兩個(gè)et200通信�。在plc上還配置一塊cp343-1的工業(yè)以太網(wǎng)卡�,還配置一臺(tái)以太網(wǎng)交換機(jī)osm實(shí)現(xiàn)與裝有wincc的操作站以及公司級(jí)的裝有pi軟件的監(jiān)視計(jì)算機(jī)通信��。工程師站使用研華(advantech)工控機(jī)���,配西門(mén)子的以太網(wǎng)卡cp1613��,以wincc6.0中文版組態(tài)軟件為開(kāi)發(fā)平臺(tái)組態(tài)的控制系統(tǒng)顯示畫(huà)面�。采用基于tcp/ip協(xié)議的工業(yè)以太網(wǎng)實(shí)現(xiàn)上、下位機(jī)的通訊,從而實(shí)現(xiàn)整個(gè)城市污水處理的管、控一體化����。
4 控制系統(tǒng)硬件設(shè)計(jì)
plc選用西門(mén)子公司simatic s7-300的可編程序控制器進(jìn)行程序控制��。cpu選用帶有profibus-dp接口的cpu315-2dp,配有et200的遠(yuǎn)程i/o點(diǎn)。由于這個(gè)污水站中央控制室與風(fēng)機(jī)房和污泥機(jī)房都沒(méi)有超過(guò)200米,所以當(dāng)選擇傳輸速率為1.5mbit/s的情況下,無(wú)需選擇rs-485中繼器即可直接用profibus電纜把它們連接起來(lái)。根據(jù)工藝的需要和控制要求�,本系統(tǒng)需要數(shù)字輸入量76點(diǎn)����,數(shù)字輸出量44點(diǎn)��,模擬輸入點(diǎn)24點(diǎn)����?�?紤]到系統(tǒng)的余量��,選用西門(mén)子的sm321的32點(diǎn)di32*24v數(shù)字量輸入模塊2塊,sm321的16點(diǎn)數(shù)字量di16*24v輸入模塊1塊����;選用sm322的do32*24v數(shù)字輸出量模塊1塊��,sm322的di16*24v數(shù)字量輸出模塊1塊;sm331的8點(diǎn)ai8*12bit模擬量輸入模塊3塊�����;sm332的2點(diǎn)ao2*12bit模擬量輸出模塊1塊��;et200遠(yuǎn)程i/o模塊兩個(gè)�����。
數(shù)字輸入模塊sm321向外提供電源�����,將位于現(xiàn)場(chǎng)的開(kāi)關(guān)觸點(diǎn)的狀態(tài)經(jīng)過(guò)光電隔離和濾波���,將從過(guò)程傳輸來(lái)的外部數(shù)字信號(hào)轉(zhuǎn)化為內(nèi)部s7-300信號(hào)電平�����。然后送至輸入緩沖器等待cpu采樣,采樣過(guò)程是信號(hào)經(jīng)過(guò)背板總線進(jìn)入到輸入映像區(qū)���。數(shù)字輸出模塊將s7-300的內(nèi)部信號(hào)電平轉(zhuǎn)化為控制過(guò)程所需的外部信號(hào)電平。按負(fù)載回路使用的電源不同分為:直流輸出模塊、交流輸出模塊和交直流兩用輸出模塊���。模擬量輸入模塊sm331用于將模擬量信號(hào)轉(zhuǎn)換成cpu內(nèi)部處理的數(shù)字信號(hào),一塊sm331模塊中的各個(gè)通道可以分別使用電流輸入和電壓輸入��,并選用不同的量程。有多種分辨率可供選擇(9-15位),我們選擇的模塊是12位的���,分辨率不同轉(zhuǎn)換時(shí)間也不同。
西門(mén)子的et200是基于profibus-dp現(xiàn)場(chǎng)總線的分布式i/o,可以與經(jīng)過(guò)認(rèn)證的非西門(mén)子公司生產(chǎn)profibus-dp主站協(xié)同運(yùn)行���。全集成自動(dòng)化概念和step7使et200能與西門(mén)子的其它自動(dòng)化系統(tǒng)協(xié)同運(yùn)行,實(shí)現(xiàn)了從硬件配置到共享數(shù)據(jù)庫(kù)等所有層次上的集成。
5 控制系統(tǒng)軟件設(shè)計(jì)
5.1 plc程序設(shè)計(jì)
plc中的程序分為操作系統(tǒng)和用戶程序,操作系統(tǒng)用來(lái)實(shí)現(xiàn)與特定的控制任務(wù)無(wú)關(guān)的功能�����,處理plc的啟動(dòng)�����、刷新輸入/輸出過(guò)程映像表�、調(diào)用用戶程序���、處理中斷和錯(cuò)誤�����、管理存貯區(qū)和處理通信等。用戶程序由用戶在step7中生成����,然后將它下載到cpu����。
以本污水處理系統(tǒng)中的物料混合裝置典型控制流程為例����,控制順序如圖3所示,用來(lái)將粉狀的固體物料(粉料)和液體物料(液料)按一定的比例混合在一起����,經(jīng)過(guò)一定時(shí)間的攪拌后便得到成品����。粉料和液料都用電子秤來(lái)計(jì)量���。
初始狀態(tài)時(shí)粉料秤秤斗�、液料秤秤斗和攪拌器都是空的,它們底部的排料閥關(guān)閉��;放料倉(cāng)的放料閥關(guān)閉��,粉料倉(cāng)下部的螺旋輸送機(jī)的電動(dòng)機(jī)和攪拌機(jī)的電動(dòng)機(jī)停轉(zhuǎn)�����;q1.0到q1.4均為0狀態(tài)�����。
plc開(kāi)機(jī)后用ob100將初始步對(duì)應(yīng)的m0.0置為1狀態(tài)�����,將其余各步對(duì)應(yīng)的存儲(chǔ)器位復(fù)位為0狀態(tài),并將mw10和mw12中的計(jì)數(shù)預(yù)置值分別送給減計(jì)數(shù)器c0和c1�。
按下啟動(dòng)按鈕i2.0��,q1.0變?yōu)?狀態(tài),螺旋輸送機(jī)的電動(dòng)機(jī)旋轉(zhuǎn)���,粉料進(jìn)入粉料秤的秤斗;同時(shí)q1.1變?yōu)?狀態(tài)���,液料倉(cāng)的放料閥打開(kāi),液料進(jìn)入液料秤的秤斗����。電子秤的光電碼盤(pán)輸出與秤斗內(nèi)物料重量秤正比的脈沖信號(hào)�����。減計(jì)數(shù)器c0和c1分別對(duì)粉料秤和液料秤產(chǎn)生的脈沖計(jì)數(shù)����。粉料脈沖計(jì)數(shù)值減至0時(shí)����,其常閉觸點(diǎn)閉合,粉料秤的秤斗內(nèi)的物料等于預(yù)置值��。q1.0變?yōu)?狀態(tài)�����,螺旋輸送機(jī)的電動(dòng)機(jī)停機(jī)。液料脈沖計(jì)數(shù)值減至0時(shí)�����,其常閉觸點(diǎn)閉合�����,液料秤內(nèi)的物料等于預(yù)置值����。q1.1變?yōu)?狀態(tài)�,關(guān)閉液料倉(cāng)的放料閥。
計(jì)數(shù)器的當(dāng)前值非0時(shí),計(jì)數(shù)器的輸出位為1�����,反之為0���。粉料稱量結(jié)束后�����,c0的常閉觸點(diǎn)閉合��,轉(zhuǎn)換條件滿足,粉料秤從步m0.1轉(zhuǎn)換到等待步m0.2,預(yù)置值送給c0����,為下一次稱量做好準(zhǔn)備。同樣的�,液料稱量結(jié)束后�����,液料秤從步m0.3轉(zhuǎn)換到等待步m0.4,預(yù)置值送給c1�。步m0.2和m0.4后面的轉(zhuǎn)換條件“=1”表示轉(zhuǎn)換條件為二進(jìn)制常數(shù)1��,即轉(zhuǎn)換條件為二進(jìn)制常數(shù)1,即轉(zhuǎn)換條件總是滿足的��。因此在兩個(gè)秤的稱量都結(jié)束后��,m0.2和m0.4同時(shí)為活動(dòng)步�����,系統(tǒng)將“無(wú)條件地”轉(zhuǎn)換到步m0.5,q1.2變?yōu)?狀態(tài)����,打開(kāi)電子秤下部的排料門(mén)���,兩個(gè)電子秤開(kāi)始排料���,排料過(guò)程用定時(shí)器t0定時(shí)���。同時(shí)q1.3變?yōu)?狀態(tài)���,攪拌機(jī)開(kāi)始攪拌���。t0的定時(shí)時(shí)間到時(shí)排料結(jié)束���,轉(zhuǎn)換到步m0.6����,攪拌機(jī)繼續(xù)攪拌�。t1的定時(shí)時(shí)間到停止攪拌,轉(zhuǎn)換到步m0.7��,q1.4變?yōu)?狀態(tài)��,攪拌器底部的排料門(mén)打開(kāi)���,經(jīng)過(guò)t2的時(shí)間后�,關(guān)閉排料門(mén)�,一個(gè)工作循環(huán)結(jié)束。
本系統(tǒng)要求在按了啟動(dòng)按鈕i2.0后�����,能連續(xù)不停地工作下去��。按了停止按鈕i2.1后�,并不立即停止運(yùn)行���,要等到當(dāng)前工藝周期的全部工作完成�,成品排放結(jié)束后,再?gòu)牟絤0.7返回到初始步m0.0����。
5.2 監(jiān)控界面設(shè)計(jì)
利用wincc6.0組態(tài)軟件開(kāi)發(fā)的的污水處理監(jiān)控界面包括調(diào)節(jié)池�、厭氧池�����、a2/o反應(yīng)池�、四沉池����、風(fēng)機(jī)及水泵、加藥等控制界面����。
以調(diào)節(jié)池���、風(fēng)機(jī)及水泵界面為例����,工業(yè)污水在調(diào)節(jié)池中的液位可以實(shí)時(shí)監(jiān)測(cè)�����,還可以通過(guò)i/o域讀取溫度�,流量及ph值等數(shù)據(jù)�����。圖6中���,可以通過(guò)電機(jī)的顏色和風(fēng)機(jī)工作狀態(tài)表觀察電機(jī)的工作狀態(tài)�,實(shí)現(xiàn)手動(dòng)和自動(dòng)控制��。





 蘇公網(wǎng)安備 32011602010312號(hào)
蘇公網(wǎng)安備 32011602010312號(hào)

